Drive System #
Top Speed #
Choosing the right drive system essentially comes down to decide what driving style you prefer and to making a realistic estimate of the desired top speed.
Important: Don’t plan too much overhead for the top speed. For optimal performance, it’s best to utilize the full throttle range. If you never exceed 50% throttle, you’ll put unnecessary stress on the entire power system and waste a lot of energy as heat.
Factors that impact top speed include:
How Do I Calculate Top Speed? #
With your drivetrain components selected, use this calculator to approximate the top speed of your car.
What Top Speed Is Best For Me? #
Please refer to the configurations examples .
KV and LiPo #
Standard RC car motors are designed to run at relatively high RPMs. Our goal is to configure the system so that the motor achieves a specific mechanical RPM when it’s at full throttle. To determine which KV motor will provide the desired RPM, we calculate it by dividing the target RPM by the LiPo voltage.
\[\text{KV} = \frac{\text{RPM}}{\text{num of cells} \times V_{\text{cell}}}\]For the Robak, our target is 30000 RPM. This value is close to optimal for a 3650 4-pole type of motor.
Let’s assume medium-charged LiPo has 3.7V per cell. To estimate KV for a 2S setup:
for 3S:
\[\text{KV} = \frac{30000}{3 \times 3.7}= \frac{30000}{11.1} \approx 2700\]The above calculations are meant to give you an idea of which KV motors match with which LiPo cell counts. Deviations from this guideline are allowed and sometimes necessary to meet your specific needs. See configurations .
Should I opt for a lower KV motor with a higher voltage LiPo, or vice versa? #
It doesn’t significantly impact performance at this scale. If you have a 4S LiPo battery on hand, feel free to use it by pairing it with a 2400KV motor and a 4S-compatible ESC. However, many great ESCs are designed to support up to 3S LiPo batteries. Therefore, I recommend sticking to 2-3S LiPo batteries for optimal compatibility.
Does Low KV Equal More Torque? #
The determining factor for a motor’s torque is its size, not the KV rating. Lowering the system’s target RPM doesn’t provide a mechanical advantage. The proper way to boost torque is by increasing the gear ratio .
Recommended reading: Benjamin Vedder Blog - Chosing the right BLDC motor and battery setup for an electric skateboard
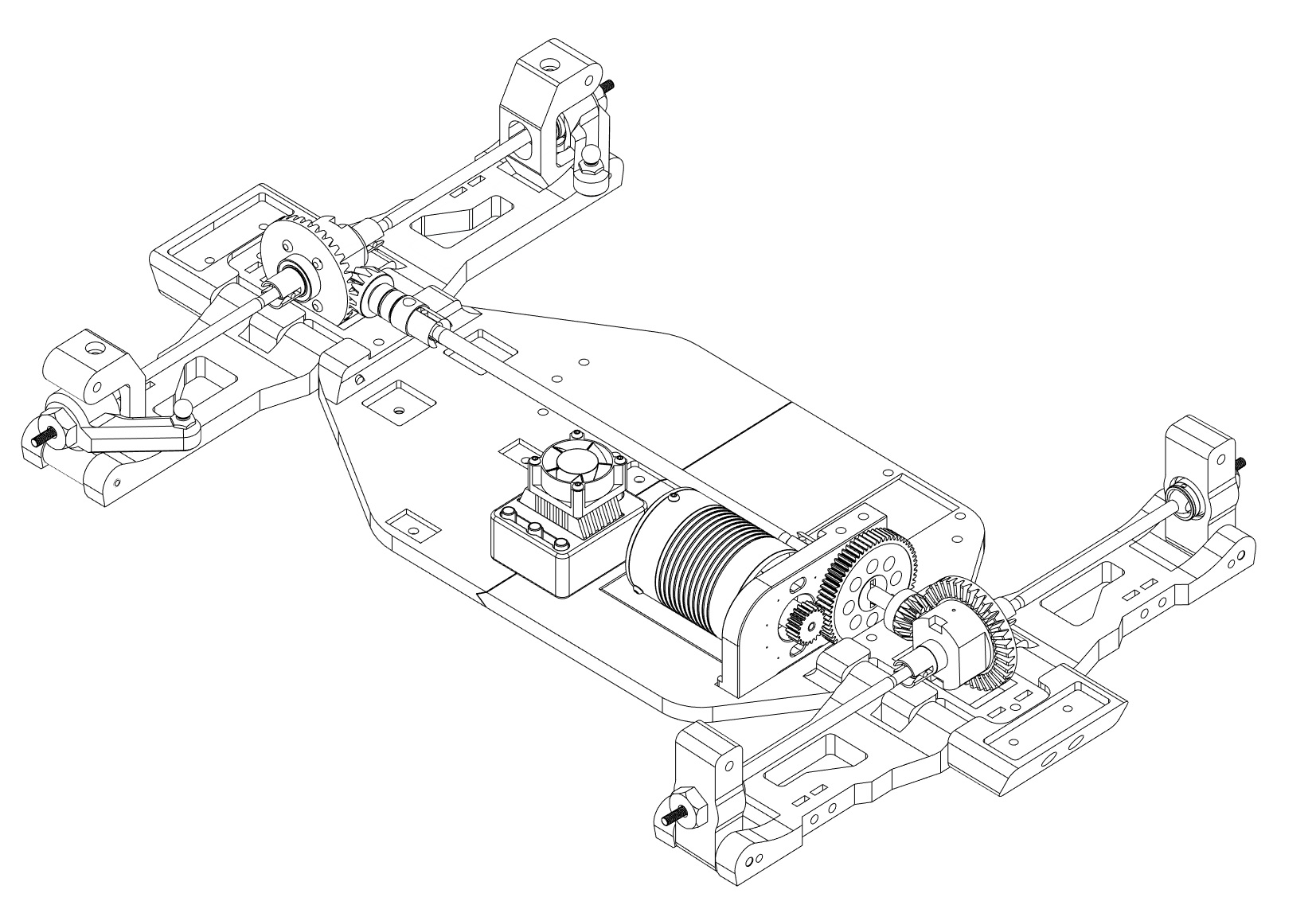
Gear Train #
RC car motors run at high RPMs and generate torque, which by itself isn’t enough to move the car. Applying these high RPMs directly to the wheels would lead to unrealistically high speeds. To address this, we use gears with varying numbers of teeth to lower the speed and increase the motor’s torque before it reaches the wheels.
In the standard HSP drivetrain of your Robak, the gear train is made up of four gears. Your options for adjusting the gear ratio are limited to replacing just the motor pinion gear.
Robak Gear Train: #
- Motor Driver Gear (pinion): Options include 17T, 21T, 26T, 29T (changeable to alter gear ratio)
- Spur Driven Gear: 64T
- Diff Driver Gear: 13T
- Diff Driven Gear: 38T
Torque multiplication is determined by the gear ratio:
\[\text{Gear Ratio} = \left( \frac{N_2}{N_1} \right) \times \left( \frac{N_4}{N_3} \right), \text{ where } N_i \text{ is the number of teeth of i-th gear in the train.}\]then, the gear ratio equation with the specific teeth counts substituted in would be:
\[\text{Gear Ratio} = \left( \frac{64}{N_1} \right) \times \left( \frac{38}{13} \right)\]This table shows how the choice of motor pinion gear affects the overall gear ratio in the Robak’s gear train setup.
| Motor Pinion Gear | Gear Ratio |
|---|---|
| 17T | 11.00 |
| 21T | 8.91 |
| 26T | 7.20 |
| 29T | 6.45 |
The smaller the pinion gear, the higher the gear ratio and greater output torque.
Need a higher gear ratio? Check out this 3D printed 19:1 gear reduction .
Wheels #
Wheels compatible with the Robak typically range from 100mm to 130mm in diameter. Larger wheels can help in achieving higher top speeds and provide more ground clearance for off-roading. However, larger wheels also have a greater moment of inertia, meaning they require more torque and, consequently, more force to achieve the same acceleration.
To discover which wheels are best for your needs, see the common Robak setups .